Overview
The Combat Robots project involved designing, manufacturing, and testing multiple robot prototypes for competitive use. Using SolidWorks CAD, I developed several iterations of the robot, refining each design for ease of assembly and manufacturability. I prioritized impact-resistant designs, choosing tough materials and used FEA analysis to estimate potential failure points in the metal weapons. Critical components were strategically located in the robot’s center for maximum protection, which led to implementation of a belt-driven weapon system.
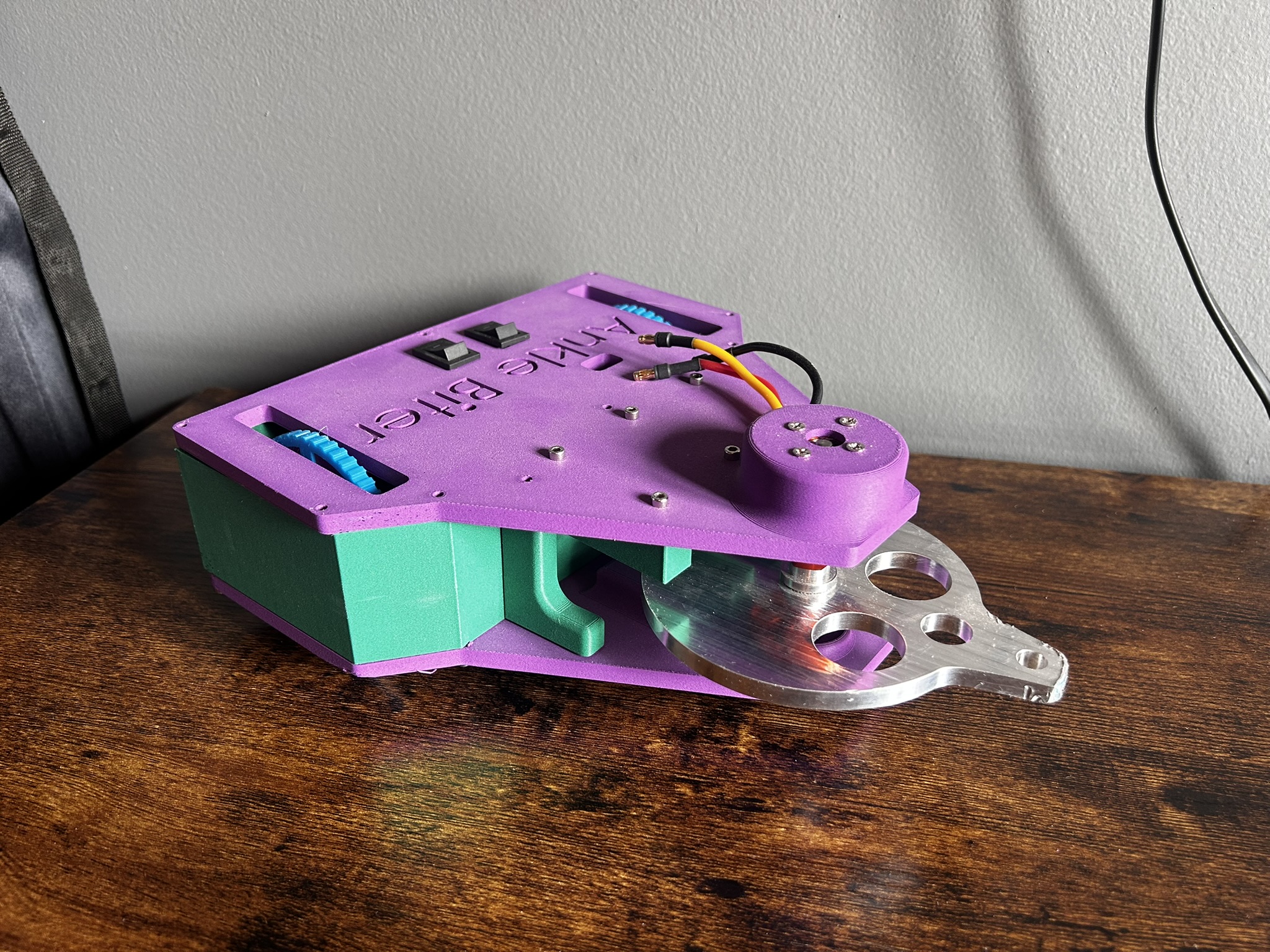
Version 1: Direct Motor Connection to Weapon

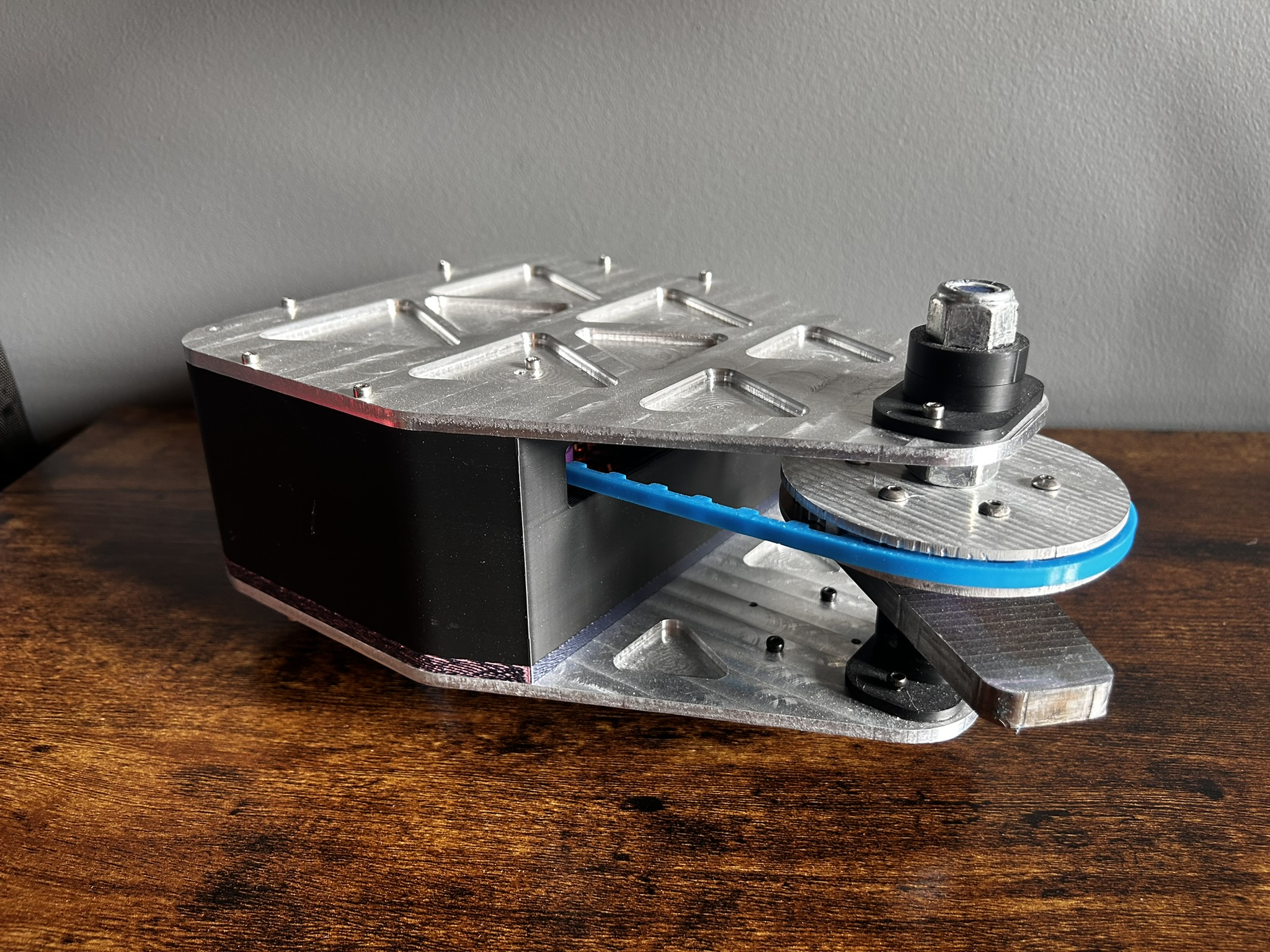
Version 3: Implemented Weapon Drive Belt
Version 5: Reinforcements of Version 3 Fundamentals
Accomplishments
Successfully integrated mechanical design, materials selection, and manufacturing techniques to create a fully functional combat robot. Iterative design process emphasized the importance of ease of assembly, manufacturing constraints, and component protection. Applied both additive and subtractive manufacturing methods to optimize performance, strength, and durability. Integrated electronic components with mechanical systems to produce a fully operational, reliable robot.